.svg)
موشک فتاح چطور از گنبد آهنین و پیکان عبور کرد؟

سرعت و قدرت مانورپذیر موشک هایپرسونیک «فتاح» دو مؤلفهای هستند که این موشک را قادر میسازد از سد بهترین سامانههای دفاع هوایی آمریکایی و اسرائیلی نظیر «تاد» و «پیکان» عبور کند.
به گزارش پارسینه و به نقل از تسنیم؛ پس از رونمایی سپاه از موشک بالستیک مانورپذیر فتاح، مهمترین ویژگیای که برای این موشک عنوان شد توانایی عبور از سد سامانههای پدافندی بود.
فتاح که در حقیقت آخرین محصول ارائهشده در خانواده موشکهای بالستیک تاکتیکی فاتح ایران و نسل «خیبرشکن» است، مجهز به سر جنگی با موتور کروی سوخت جامد با نازل متحرک و قابلیت مانورپذیری و تغییر مسیر و رسیدن به سرعت سرسامآور 13 تا 15 ماخ است که همین ویژگیهای سبب شده است بتواند از سد سامانههای دفاع موشکی عبور کند.
معروفترین سامانه ضدموشکی آمریکا در منطقه سامانه تاد (THAAD) است و آرو 2و3 (ARROW) نیز سامانههای دفاع ضدموشکی رژیم صهیونیستی برای مقابله با موشکهای بالستیک تاکتیکی هستند.
سامانه تاد یک سامانه دفاع ضدموشکی ساخت کارخانه لاکهیدمارتین است که در سال 2008 رسماً وارد خدمت در ارتش آمریکا شد. این سامانه از چهار جزء اصلی شامل رادار TPY-2، مرکز فرماندهی و کنترل، پرتابگرها و موشک رهگیر تشکیل شده است. این رادار قادر است از فاصله 1000کیلومتری اهداف را کشف کند و برد موشک این سامانه نیز 200 کیلومتر است و از یک موتور راکتی سوخت جامد با نازل متحرک بهره میبرد که سرعت این موشک را به حدود 8 ماخ میرساند.


تصویر بالا سامانه تاد در حال شلیک موشک/ تصویر پایین رادار TPY-2 سامانه تاد
آرو یا پیکان نام سامانهای است که سازمان صنایع هوافضای رژیم صهیونیستی با مشارکت آمریکاییها برای مقابله با موشکهای بالستیک طراحی و تولید کرده است. سامانه آروـ1 بهعنوان اثباتگر فناوری ساخته شد وپس از آن موشک آروـ2 بهعنوان سامانه عملیاتی طراحی و در سال 2000 اولین آتشبار آن در سرزمینهای اشغالی عملیاتی شد، از آن زمان تا 2017 این سامانه در چهار پروژه ارتقا یافت و پس از آن هم موشک آروـ3 طراحی و تولید شد.

موشکهای آرو 2 و 3
این سامانه از 4 سیستم اصلی تشکیل شده است. موشکهای رهگیر پیکان، رادار گرین پاین، مرکز فرماندهی کنترل و مرکز هدایت موشک که تمامی این سیستمها مانند سامانههای پاتریوت و تاد آمریکایی قابل تحرک و جابهجایی هستند. سامانه آرو از رادارهای گرین پاین و سوپر گرین پاین بهره میبرد که برد کشف هرکدام بهترتیب 500 و 900 کیلومتر است.
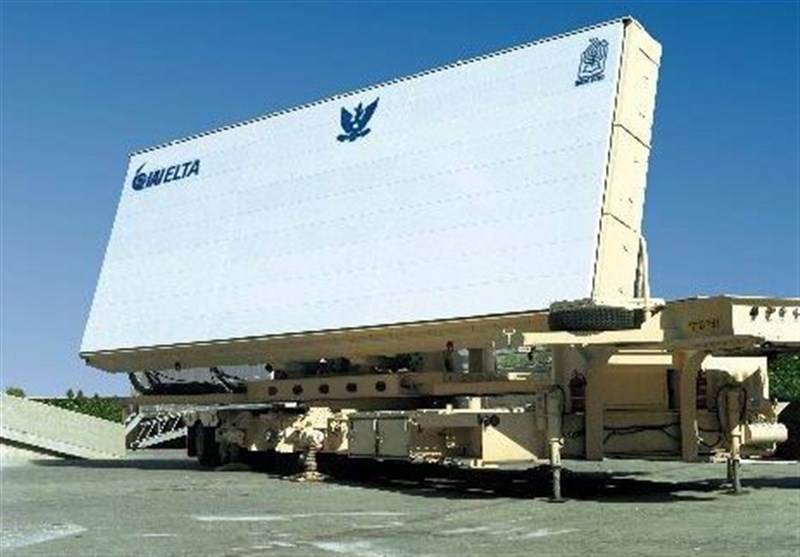
رادار گرین پاین

رادار سوپر گرین پاین
همچنین سامانه پیکان از دو موشک بهنامهای آروـ2 با برد 100 کیلومتر و آروـ3 بهره میبرد، اما ارتفاع درگیری موشک آروـ2 10 تا 50 کیلومتر و موشک آروـ3، 100 کیلومتر عنوان شده است.
هردو سامانه عملکردی مشابه یکدیگر دارند و پس از آنکه رادار، هدف را کشف و محل مناسب برای برخورد با آن را بر اساس سرعت، ارتفاع و مسیر حرکت آن محاسبه کرد، اطلاعات را به مرکز فرماندهی و کنترل سامانه میدهد و این مرکز هم بهترین پرتابگر را برای درگیری با موشک مهاجم انتخاب و دستور شلیک را صادر میکند و همچنین اطلاعات لازم برای هدایت موشک را تا لحظه برخورد به آن منتقل میکند.
اما نکتهای که در این بین وجود دارد آن است که این سامانهها زمانی قادر به رهگیری هدف هستند که موشک فاز میانی حرکت خود را طی میکند و چنانچه تغییری در مؤلفههای حرکتی موشک رخ دهد سامانه دچار خطا خواهد شد.
برای جبران این خطا سامانه باید مجدداً موفق به کشف و ردگیری موشک مهاجم شود و در صورت موفقیت اگر باز هم موشک مهاجم تغییر مسیر شدید دهد قفل راداری احتمالی شکسته میشود و فرایند باید مجدداً تکرار شود، حال سامانه پدافندی بر اساس کدام موقعیت لحظهای، موشکهای خود را روانه کند؟
موشک فتاح از فاصله 1400کیلومتری بهسمت هدف شلیک میشود و زمانی توسط رادار سامانههای تاد و آرو شناسایی میشود که درست در فاز میانی حرکت خود قرار دارد و چنانچه سامانه آرو از رادار گرین پاین استفاده کند ـ با توجه به برد 500کیلومتری آن ـ زمانی موشک فتاح شناسایی میشود که در یکسوم پایانی مسیر خود قرار دارد، بنابراین رادار هم محاسبات اولیه خود را بر اساس پروفایل حرکتی موشک در این فازها محاسبه میکند.
البته در پوشش بدنه موشک فتاح از مواد جاذب امواج رادار هم استفاده شده است که هم سبب کاهش برد مؤثر و هم سبب ایجاد خطا در محاسبات میشود اما بهعنوان یک فرض کمککننده به تعادل مسئله، فرض میشود که فتاح در بیشترین برد سامانه دشمن کشف شود.
هرچند این رادارها هدف را بهصورت لحظهای رصد و تغییرات مسیر پروازی موشک مهاجم را به موشک پدافندی ارسال میکنند، اما اگر این تغییرات چیزی فراتر از بازه سرعتی قابل تشخیص رادار و یا سرعت موشک پدافندی باشد، این سامانهها دیگر قادر به رهگیری و انهدام موشک نیستند.
در صورت شلیک موشک پدافندی، امکان تغییر مسیر برای این موشک ـ بهسبب اینکه در حال صرف انرژی پیشران برای غلبه بر جاذبه زمین و کسب سرعت بهصورت توأمان است ـ بهمیزان کمی وجود دارد و با اجرای دو یا سه مانور سنگین توسط موشک هایپرسونیک مانوردهنده عملاً موشک پدافندی انرژی کافی برای ادامه تعقیب و رفتن بهسمت مختصات جدیدی که معلوم نیست چند لحظه دیگر اعتبار دارد، نخواهد داشت، موضوعی که دقیقاً در طراحی موشک مانورپذیر فتاح رعایت شده است.
موشک فتاح از زمان شلیک تا فاصله 500کیلومتری هدف (دوسوم مسیر حرکت موشک) در یک مسیر مشخص و با سرعت معینی حرکت میکند، اما درست در یکسوم پایانی مسیر خود، با روشن شدن موتور سوخت جامد مجهز به نازل متحرک بهناگاه هم سرعت خود را به حدود سه برابر سرعت اولیه افزایش میدهد و هم شروع به مانور و تغییر مسیر میکند و همین امر موجب خطا در محاسبات سامانههای پدافندی میشود، موضوعی که در دسامبر سال 2014 نیز رخ داد و بهنظر میرسد رادار سامانه آرو به همین دلیل قادر به به رهگیری موشک هدف نشده باشد.
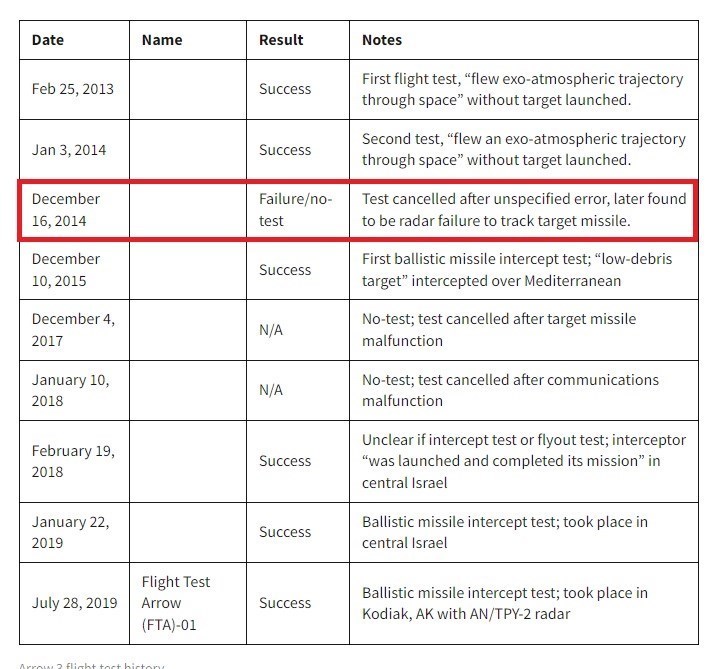
تستهای انجامشده توسط سامانه آروـ3/ منبع سایت CSIS
حال اگر دشمن از رادار گرین پاین استفاده کند با توجه به همزمانی فعالیت موتور سر جنگی موشک فتاح و برد کشف این رادار (فاصله 500کیلومتری) قادر به رهگیری موشک بهدلیل مانورهای تغییر مسیر آن نخواهد بود و در صورتی که از رادارهای TPY-2 و سوپرگرین پاین هم که برد بیشتری دارند استفاده کند بهدلیل سرعت بالای موشک در عین مانورهای متعدد، قادر به شکار آن نخواهد بود. سرعت موشکهای سامانه تاد و آروـ2 و 3 نهایتاً 8 تا 10 ماخ است در صورتی که سرعت موشک فتاح در فاز نهایی به 13 تا 15 ماخ میرسد؛ به این ترتیب پیش از آنکه موشک سامانههای پدافندی به محل برخورد به موشک فتاح برسد، این موشک از آن محل عبور کرده است و آنها قادر به انهدام این موشک نخواهند بود.
به این ترتیب بهنظر میرسد طراحی موشک فتاح با بررسی دقیق توانایی بهترین سامانههای پدافندی آمریکایی و اسرائیلی مستقر در منطقه صورت گرفته است و قادر خواهد بود با گذر از این سامانهها، آنها را منهدم و راه برای موجهای بعدی حملات موشکی باز کند.
موشک فتاح کنار سایر روشهای مقابله با سامانههای پدافندی ضدموشکی دشمن، قابلیت جدیدی به شبکه پکپارچه موشکی و پهپادی جبهه مقاومت اضافه کرده است که بهنظر میرسد تا به نتیجه نرسیدن طرحهای توسعه سامانههای پدافندی دشمن، فعلاً راه مقابله مطمئنی با آن وجود ندارد.




































ارسال نظر