.svg)
"غزال فضایی" را ببینید

پارسینه: "اسپیسبوک" نام رباتی است که به سفارش آژانس فضایی اروپا و توسط محققان موسسه فناوری فدرال زوریخ و موسسه "ژاو" زوریخ برای جست و خیز در فضاهای کم گرانش طراحی شده است.
تاکنون رباتهایی را دیدهایم که میتوانند راه بروند، بدوند و حتی معلق بزنند، اما در حال حاضر یک تیم دانشجویی بر روی یک نمونه اولیه ربات کار میکند که میتواند جست و خیز کند.
این ربات با نام "اسپیسبوک" (SpaceBok) به معنی "غزال فضایی" توسط دانشجویان مؤسسه فناوری فدرال زوریخ و مؤسسه "ژاو" (ZHAW) زوریخ طراحی و ساخته شده است و در مرکز فنی آژانس فضایی اروپا (ESA) در هلند مورد آزمایش قرار گرفته است و طوری ساخته شده که بتواند در محیطی با گرانش کمتر نسبت به زمین مانند ماه، به گونهای جست و خیزهای کنترل شده داشته باشد که هر چهار پایش از زمین جدا شوند.
این ربات با نام "اسپیسبوک" (SpaceBok) به معنی "غزال فضایی" توسط دانشجویان مؤسسه فناوری فدرال زوریخ و مؤسسه "ژاو" (ZHAW) زوریخ طراحی و ساخته شده است و در مرکز فنی آژانس فضایی اروپا (ESA) در هلند مورد آزمایش قرار گرفته است و طوری ساخته شده که بتواند در محیطی با گرانش کمتر نسبت به زمین مانند ماه، به گونهای جست و خیزهای کنترل شده داشته باشد که هر چهار پایش از زمین جدا شوند.
هنگامی که مأموریت "آپولو ۱۱" بر روی ماه فرود آمد، یکی از وظایفی که به نیل آرمسترانگ و باز آلدرین محول شد، تمرین نحوه حرکت با پای پیاده در ماه بود که یک ششم زمین گرانش دارد. همانطور که هر دو فضانورد از قبل تحت گرانش شبیهسازی شده تمرین کرده بودند، هنگام حضور در ماه نیز جایگزینی برای حرکت کانگورو وار در سطح ماه نیافتند و اولین پیادهروی بشر روی ماه را که دو ساعت و نیم طول کشید به همین صورت حرکت کردند.
فضانوردان دریافتند که پیادهروی معمولی در فشار لباس فضانوردی و در گرانش ماه چندان کاربردی نیست، در حالی که میتوانستند به راحتی با یک پرش، ۱ متر از سطح ماه جدا شوند و پیش بروند. در نتیجه آنها متوجه شدند که میتوانند با جست و خیزهای منظم و کنترل شده مانند یک کانگورو، به خوبی روی ماه حرکت کنند.
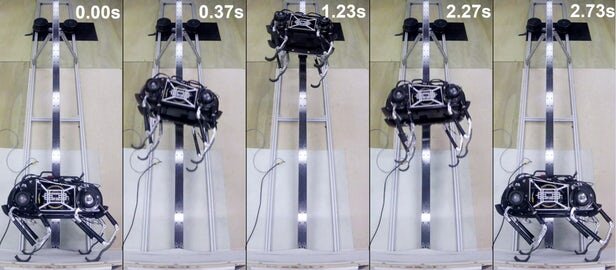
به گفته تیم سوئیسی سازنده "اسپیسبوک" که نام آن را از غزال آفریقایی (Springbok) الهام گرفتهاند، این ربات میتواند تا ۲ متر به صورت عمودی بر روی ماه بالا بپرد که این بدان معنی است که میتواند با سرعت شگفت انگیزی حرکت کند.
با این حال، با توجه به اینکه این ربات در فواصل بین پرشها هیچ تکیهگاهی ندارد و هر چهار پایش از سطح جدا میشوند، ثبات و پایداری ربات و توانایی آن در حفظ تعادل در هنگام فرود یک چالش واقعی است.
"هنریک کولنباخ" سرپرست این پروژه میگوید: به جای پیادهروی معمولی که در آن حداقل سه پا همیشه با زمین تماس دارند، جست و خیز به ربات ما اجازه میدهد تا به راحتی در محیط کم گرانش حرکت کند. جست و خیز و پرش در محیطهایی با جاذبه پایین مانند ماه، مریخ یا سیارکها یک راه بسیار کارآمد برای حرکت در آنها است.
وی افزود: حیواناتی مانند غزال آفریقایی و کانگورو از این روش برای افزایش کارایی حرکت خود استفاده میکنند، اما تا همین اواخر، قدرت محاسباتی و الگوریتمهای مورد نیاز برای توسعه رباتهایی که بتوانند تعادل خود را بعد از هر بار پرش حفظ کنند وجود نداشت.

"اسپیسبوک" از پاهای خود به عنوان واحدهای ذخیره انرژی استفاده میکند و پس از هر بار پرش، انرژی حاصل از برخورد با سطح را جذب میکند و سپس این نیرو را برای پرش بعدی استفاده میکند.
این ربات علاوه بر این ویژگی، چیزی دارد که غزال آفریقایی ندارد. این ربات به سه چرخ واکنشی مجهز است که به آن اجازه میدهد در لحظه به دور خود بچرخد و تغییر مسیر دهد.
تیم سازنده تاکنون توانسته است "غزال فضایی" را تا ارتفاع ۱.۳ متر تحت گرانش شبیه سازی ماه بپراند. آنها همچنین امکانات آزمایشی را ایجاد کردهاند که تقریباً گرانش بسیار کم سیارکها را شبیهسازی میکند، جایی که ربات زمان بیشتری را در هوا معلق میماند.
محققان برای انجام این کار از فناوری یکپارچه رباتیک مداری آژانس فضایی اروپا موسوم به "ORBIT" در آزمایشگاه رباتیک و هدایت رباتیک این آژانس استفاده کردند.
کولنباخ میگوید: این آزمایش به اندازه کافی خوب پیش رفت و ما حتی از "اسپیسبوک" برای انجام یک بازی اکشن زنده استفاده کردیم.
آزمایشهای بعدی این ربات در محیطهایی انجام خواهد شد که شامل موانع، زمینهای پر از تپه و خاک واقع گرایانه باشد و سپس با آزمایشات در فضای باز دنبال میشود.
منبع:
خبرگزاری ایسنا

































ارسال نظر