.svg)
دست رباتیک به دست واقعی نزدیکتر شد
پارسینه: محققان سیستم شبیه ساز کامپیوتری یک دست رباتیک را به نحوی آموزش دادند که با استفاده از روش آزمون و خطا، حرکات جدیدی را بیاموزد که مجموعهای از دادههای یک دست رباتیک را شامل شود.
گروه تحقیقات رباتیک "OpenAI" به تازگی موفق به توسعه دنیای رباتیک شدهاند.
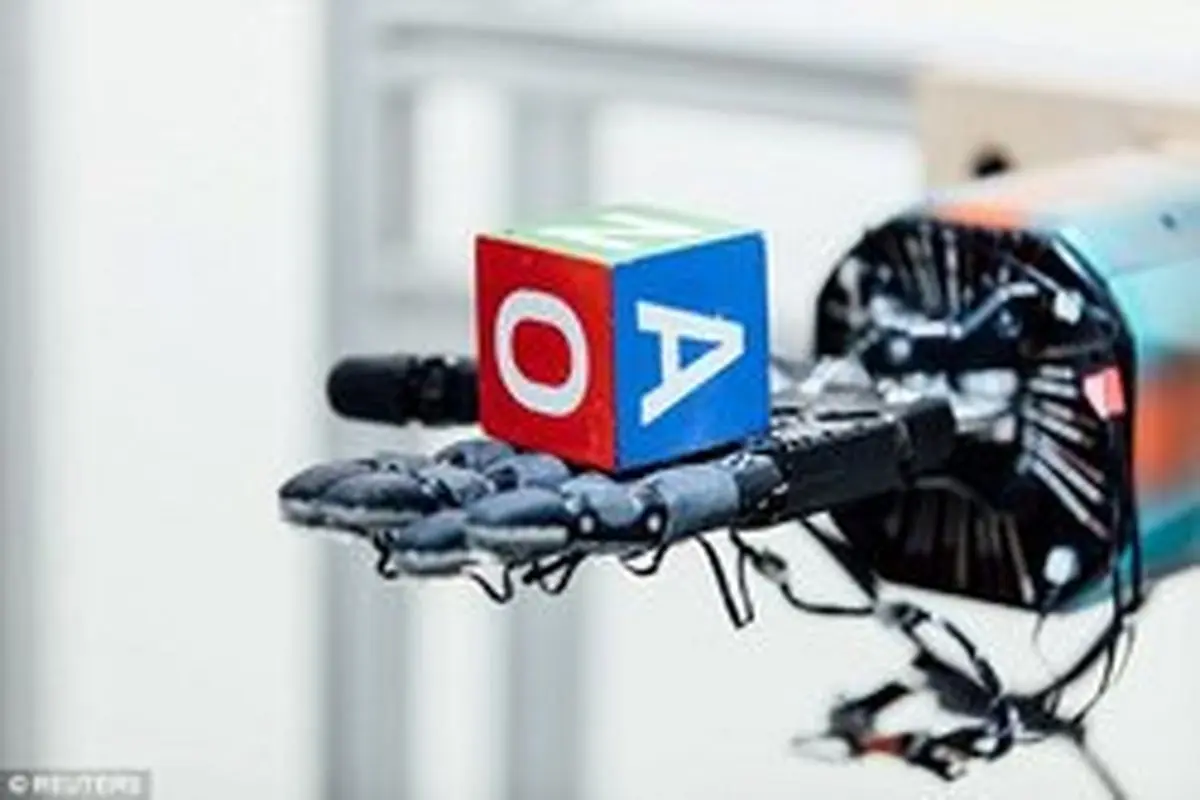
این شرکت توانسته دست رباتیکی تولید کند که قادر است با استفاده از یک سیستم پیچیده موسوم به "داکتیل"(Dactyl)، اشیاء را جابجا کند.
محققان سیستم شبیه ساز کامپیوتری یک دست رباتیک را به نحوی آموزش دادند که با استفاده از روش آزمون و خطا، حرکات جدیدی را بیاموزد که مجموعهای از دادههای یک دست رباتیک را شامل شود.
این دست رباتیک نیاز به هیچ گونه دخالتی از جانب انسانها ندارد.
گرچه که جابه جا کردن اشیاء یک کار معمولی در زندگی روزمره انسانها است، ولی این امر هنوز برای رباتها یک چالش محسوب میشود.
رباتهای مدرن امروزی برای انجام وظایف خاصی طراحی شدهاند و عمدتا قادر به استفاده از دستگاه پیچیدهای موسوم به "end effector" نیستند.
"end effector" دستگاهی است که در انتهای بازوی رباتیک قرار میگیرد و برای برقراری ارتباط با محیط اطراف طراحی شده است.
محققان این پروژه گفتند: ما روشی را ایجاد کردیم که بتوان آن را در یک ربات استفاده کرد.
محققان در ابتدا یک دست شبیهسازی شده در سیستم تولید کردند که به آن گفته شد که روشهای متفاوتی برای برداشتن یک مکعب را امتحان کند.
هدف از این کار این بود که تمام ابعاد مکعب نشان داده شود. در هر بعد این مکعب یک حرف متفاوت نوشته شده بود.
هر بار که این دست مجازی این مکعب را میچرخاند و یک حرف متفاوت را نشان میداد، محققان یک امتیاز مثبت به آن میدادند.
و هر بار که این دست به اشتباه این مکعب را میچرخاند و حروف تکراری را به نمایش میگذاشت، سیستم یک امتیاز از آن کسر میکرد.
این دست مجازی خود به تنهایی قادر بود برخی از حرکاتی که انسان انجام میدهد، مانند چرخاندن مکعب را خود انجام دهد.
زمانی که محققان عملکرد خوب این دست مجازی را دیدند، آن را در یک دست رباتیک اعمال کرده و انتقال دادند.
این دست رباتیک " Shadow Dexterous Hand" نام دارد.
محققان معتقدند این مطالعه میتواند به عنوان مثالی مهم برای الگوریتمهای "یادگیری عمیق"(deep learning )باشد.
این ربات میتواند توسط شرکتهایی که به دنبال "خودکارسازی" تجهیزات کار خود هستند، مورد استفاده قرار گیرد.
نتایج این پژوهش در مقاله 'Dexterous In-Hand Manipulation' منتشر خواهد شد.
این شرکت توانسته دست رباتیکی تولید کند که قادر است با استفاده از یک سیستم پیچیده موسوم به "داکتیل"(Dactyl)، اشیاء را جابجا کند.
محققان سیستم شبیه ساز کامپیوتری یک دست رباتیک را به نحوی آموزش دادند که با استفاده از روش آزمون و خطا، حرکات جدیدی را بیاموزد که مجموعهای از دادههای یک دست رباتیک را شامل شود.
این دست رباتیک نیاز به هیچ گونه دخالتی از جانب انسانها ندارد.
گرچه که جابه جا کردن اشیاء یک کار معمولی در زندگی روزمره انسانها است، ولی این امر هنوز برای رباتها یک چالش محسوب میشود.
رباتهای مدرن امروزی برای انجام وظایف خاصی طراحی شدهاند و عمدتا قادر به استفاده از دستگاه پیچیدهای موسوم به "end effector" نیستند.
"end effector" دستگاهی است که در انتهای بازوی رباتیک قرار میگیرد و برای برقراری ارتباط با محیط اطراف طراحی شده است.
محققان این پروژه گفتند: ما روشی را ایجاد کردیم که بتوان آن را در یک ربات استفاده کرد.
محققان در ابتدا یک دست شبیهسازی شده در سیستم تولید کردند که به آن گفته شد که روشهای متفاوتی برای برداشتن یک مکعب را امتحان کند.
هدف از این کار این بود که تمام ابعاد مکعب نشان داده شود. در هر بعد این مکعب یک حرف متفاوت نوشته شده بود.
هر بار که این دست مجازی این مکعب را میچرخاند و یک حرف متفاوت را نشان میداد، محققان یک امتیاز مثبت به آن میدادند.
و هر بار که این دست به اشتباه این مکعب را میچرخاند و حروف تکراری را به نمایش میگذاشت، سیستم یک امتیاز از آن کسر میکرد.
این دست مجازی خود به تنهایی قادر بود برخی از حرکاتی که انسان انجام میدهد، مانند چرخاندن مکعب را خود انجام دهد.
زمانی که محققان عملکرد خوب این دست مجازی را دیدند، آن را در یک دست رباتیک اعمال کرده و انتقال دادند.
این دست رباتیک " Shadow Dexterous Hand" نام دارد.
محققان معتقدند این مطالعه میتواند به عنوان مثالی مهم برای الگوریتمهای "یادگیری عمیق"(deep learning )باشد.
این ربات میتواند توسط شرکتهایی که به دنبال "خودکارسازی" تجهیزات کار خود هستند، مورد استفاده قرار گیرد.
نتایج این پژوهش در مقاله 'Dexterous In-Hand Manipulation' منتشر خواهد شد.
منبع:
خبرگزاری ایسنا



































ارسال نظر